MEMS INERTIAL NAVIGATION SYSTE

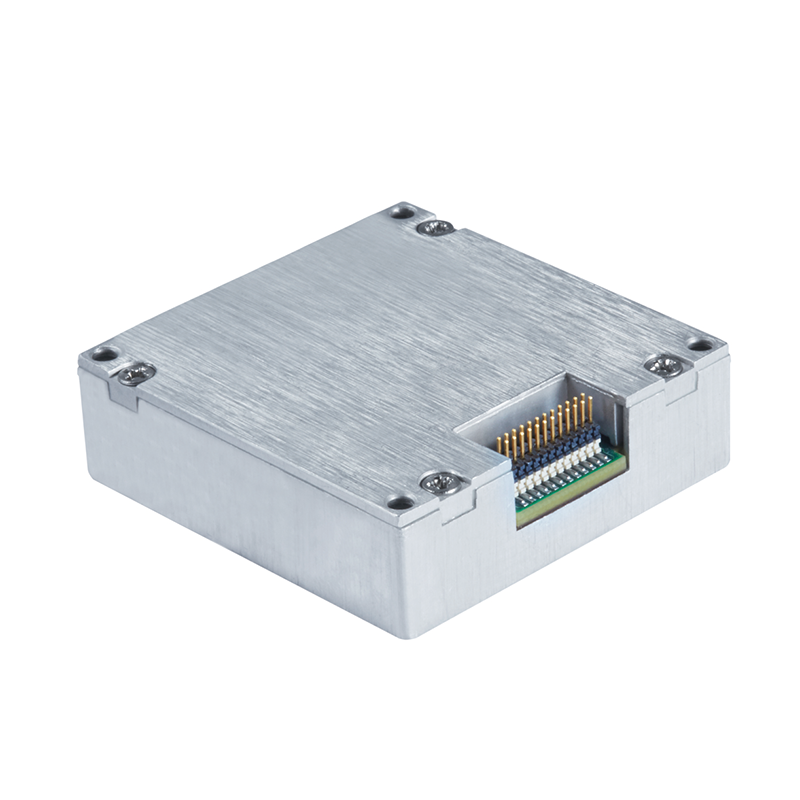
KT-EX6-1 INERTIAL MEASUREMENT UNIT
FEATURES
• Miniature package.
• Low noise.
• Low bias instability.
• Excellent performance in vibration and shock environments.
• 9 axes offered in same package.
• Electronically calibrated axis alignment.
• 0.05°/hr in-run bias stability 0.02°/√hr angular random walk 0.02% nonlinearity.
• Triaxial, digital accelerometer, High stability accelerometers and inclinometers.
• Single-supply operation: 4.5 V to 5.5 V.
• 2000 g shock survivability.
• Operating temperature range: -45°C to +85°C.
GENERAL DESCRIPTION
The KT-EX6-1 is a Micro-Electro-Mechanical System (MEMS) based Inertial Measurement Unit (IMU) designed to meet the needs of a range of applications across various markets including agriculture, AUVs, industrial equipment, robotics, survey/mapping, stabilized platforms, transportation, UAVs, and UGVs. With an industry standard communication interface, the KT-EX6-1 is easily integrated into the variety of architectures that these applications present. The extremelysmall size, light weight, and low power make the KT-EX6-1 ideal for most applications.
The KT-EX6-1 includes MEMS gyroscopes , accelerometers and inclinometers. In addition, the KT- EX6-1employs an internal environmental isolation system to attenuate unwanted inputs commonly encountered in real world applications. The internal isolation and other proprietary design features ensure the KT-EX6-1is rugged enough to meet the needs of the most demanding users.
APPLICATIONS
• survey/mapping
• Platform stabilization and control
• Navigation
• Instrumentation
• Robotics
SPECIFICATIONS
TC = 25°C, VDD = 5.0 V, angular rate = 0°/sec, dynamic range = ±400°/sec, ± 1 g, unless otherwise noted.
General
Table 1 Specifications, general
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| GENERAL | |||||
| POWER SUPPLY | 4.5 | 5 | 5.5 | V | |
| Power consumption1 | 1.2 | 2 | W | ||
| Start-Up time after Power-On | 1 | s | |||
| RS4222 | |||||
| Start Bit | 1 | bit | |||
| Data Length | 8 | bits | |||
| Parity | NONE | ||||
| Stop Bits | 1 | bit | |||
| Input resistance | 120 | Ω | |||
| EXTERNAL TRIGGER (ExtTrig PIN) | |||||
| Logic levels | “high” | 2.3 | V | ||
| TIME OF VALIDITY (TOV PIN) | “low” | 0.6 | V | ||
| VOH | 3.3V logic: IOH = 8mA | 3.12 | V | ||
| 3.3V logic: IOH = 20mA | 2.84 | V | |||
| VOL | IOL = 8 mA | 0.16 | V | ||
| TOV active level | “low” | ||||
| CHASSIS | |||||
| Isolation resistance chassis to GND (pin 15) | 500VDC | 100 | MΩ | ||
1 Supply current transients can reach 700mA during initial start up or reset recovery, ref Figure 90.
2 Other values can be configured.
400°/s Gyroscope (KT-EX6-1-x)
Table 2 Specifications, gyros (range 400°/s, KT-EX6-1-x)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| GYROSCOPES | |||||
| Dynamic Range | ±400 | °/sec | |||
| Repeatability1 | −45°C ≤ TC ≤ +85°C | 0.01 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C | ||
| Misalignment | Axis to axis | ±0.05 | Degrees | ||
| Axis to frame (package) | ±0.05 | Degrees | |||
| Nonlinearity | Best fit straight line, FS = 400°/sec | 0.02 | % of FS | ||
| Bias Repeatability1, 2 | −45°C ≤ TC ≤ +85°C, 1 σ | 1 | °/h | ||
| In-Run Bias Stability | 1 σ | 0.3 | °/hr | ||
| Angular Random Walk | 1 σ | 0.15 | °/√hr | ||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±0.15 | °/h/°C | ||
| Linear Acceleration Effect on Bias | Any axis, 1 σ | 1 | °/h/g | ||
| Output Noise | No filtering | 0.1 | °/sec rms | ||
| 3 dB Bandwidth | 250 | Hz | |||
| Sensor Resonant Frequency | 11.5 | 12 | 12.5 | kHz |
1 The repeatability specifications represent analytical projections based on the following drift contributions and conditions: temperature hysteresis (−45°C to +85°C), electronics drift (high temperature operating life test: +110°C, 500 hours), drift from temperature cycling, rate random walk and broadband noise.
2 Bias repeatability describes a long-term behavior over a variety of conditions. Short-term repeatability relates to the in-run bias stability and noise density specifications.
400°/s Gyroscope (KT-EX6-1A-x)
Table 3 Specifications, gyros (range 400°/s,KT-EX6-1A-x)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| GYROSCOPES | |||||
| Dynamic Range | ±400 | °/sec | |||
| Repeatability1 | −45°C ≤ TC ≤ +85°C | 0.01 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C | ||
| Misalignment | Axis to axis | ±0.05 | Degrees | ||
| Axis to frame (package) | ±0.05 | Degrees | |||
| Nonlinearity | Best fit straight line, FS = 400°/sec | 0.02 | % of FS | ||
| Bias Repeatability1, 2 | −45°C ≤ TC ≤ +85°C, 1 σ | 0.5 | °/h | ||
| In-Run Bias Stability | 1 σ | 0.1 | °/hr | ||
| Angular Random Walk | 1 σ | 0.05 | °/√hr | ||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±0.1 | °/h/°C |
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit | |
| Linear Acceleration Effect on Bias | Any axis, 1 σ | 1 | °/h/g | |||
| Output Noise | No filtering | 0.1 | °/sec rms | |||
| 3 dB Bandwidth | 250 | Hz | ||||
| Sensor Resonant Frequency | 11.5 | 12 | 12.5 | kHz | ||
400°/s Gyroscope (KT-EX6-1B-x)
Table 4 Specifications, gyros (range 400°/s,KT-EX6-1B-x)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| GYROSCOPES | |||||
| Dynamic Range | ±400 | °/sec | |||
| Repeatability1 | −45°C ≤ TC ≤ +85°C | 0.01 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C | ||
| Misalignment | Axis to axis | ±0.05 | Degrees | ||
| Axis to frame (package) | ±0.05 | Degrees | |||
| Nonlinearity | Best fit straight line, FS = 400°/sec | 0.02 | % of FS | ||
| Bias Repeatability1, 2 | −45°C ≤ TC ≤ +85°C, 1 σ | 0.3 | °/h | ||
| In-Run Bias Stability | 1 σ | 0.05 | °/hr | ||
| Angular Random Walk | 1 σ | 0.02 | °/√hr | ||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±0.05 | °/h/°C | ||
| Linear Acceleration Effect on Bias | Any axis, 1 σ | 1 | °/h/g | ||
| Output Noise | No filtering | 0.05 | °/sec rms | ||
| 3 dB Bandwidth | 150 | Hz | |||
| Sensor Resonant Frequency | 11.5 | 12 | 12.5 | kHz |
2000°/s Gyroscope (KT-EX6-1C-x)
Table 5 Specifications, gyros (range 2000°/s, ,KT-EX6-1C-x)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| GYROSCOPES | |||||
| Dynamic Range | ±2000 | °/sec | |||
| Repeatability | −45°C ≤ TC ≤ +85°C | 0.01 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C | ||
| Misalignment | Axis to axis | ±0.05 | Degrees | ||
| Axis to frame (package) | ±0.05 | Degrees | |||
| Nonlinearity | Best fit straight line, FS = 1000°/sec | 0.03 | % of FS | ||
| Bias Repeatability | −45°C ≤ TC ≤ +85°C, 1 σ | 2 | °/h | ||
| In-Run Bias Stability | 1 σ | 1 | °/hr |
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit | |
| Angular Random Walk | 1 σ | 0.3 | °/√hr | |||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±0.3 | °/h/°C | |||
| Linear Acceleration Effect on Bias | Any axis, 1 σ | 2 | °/h/g | |||
| Output Noise | No filtering | 0.2 | °/sec rms | |||
| 3 dB Bandwidth | 250 | Hz | ||||
| Sensor Resonant Frequency | 12 | kHz | ||||
10g Accelerometers(KT-EX6-1y-1)
Table 6 Specifications, accelerometers (10g,KT-EX6-1y-1)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| ACCELEROMETERS | Each axis | ||||
| Dynamic Range | ±10 | g | |||
| Repeatability1 | −45°C ≤ TC ≤ +85°C | ±0.02 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C | ||
| Misalignment | Axis to axis | ±0.05 | Degrees | ||
| Axis to frame (package) | ±0.05 | Degrees | |||
| Nonlinearity | Best fit straight line, ±10 g | 0.05 | % of FS | ||
| Bias Repeatability1, 2 | −45°C ≤ TC ≤ +85°C, 1 σ | 0.1 | mg | ||
| In-Run Bias Stability | 1 σ | 0.01 | mg | ||
| Velocity Random Walk | 1 σ | 0.001 | m/sec/√hr | ||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C | ±0.025 | mg/°C | ||
| Output Noise | No filtering | 0.5 | mg rms | ||
| 3 dB Bandwidth | 100 | Hz | |||
| Sensor Resonant Frequency | 2 | kHz |
1 The repeatability specifications represent analytical projections based on the following drift contributions and conditions: temperature hysteresis (−45°C to +85°C), electronics drift (high temperature operating life test: +110°C, 500 hours), drift from temperature cycling, rate random walk and broadband noise.
2 Bias repeatability describes a long-term behavior over a variety of conditions. Short-term repeatability relates to the in-run bias stability and noise density specifications.
30g Accelerometers(KT-EX6-1y-2)
Table 7 Specifications, accelerometers (30g,KT-EX6-1y-2)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| ACCELEROMETERS | Each axis | ||||
| Dynamic Range | ±30 | g | |||
| Repeatability | −45°C ≤ TC ≤ +85°C | ±0.02 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C |
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit | |
| Misalignment | Axis to axis | ±0.05 | Degrees | |||
| Axis to frame (package) | ±0.05 | Degrees | ||||
| Nonlinearity | Best fit straight line, ±30 g | 0.1 | % of FS | |||
| Bias Repeatability | −45°C ≤ TC ≤ +85°C, 1 σ | 0.5 | mg | |||
| In-Run Bias Stability | 1 σ | 0.05 | mg | |||
| Velocity Random Walk | 1 σ | 0.002 | m/sec/√hr | |||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C | ±0.025 | mg/°C | |||
| Output Noise | No filtering | 0.6 | mg rms | |||
| 3 dB Bandwidth | 100 | Hz | ||||
| Sensor Resonant Frequency | 2 | kHz | ||||
50g Accelerometers(KT-EX6-1y-3)
Table 8 Specifications, accelerometers (50g,KT-EX6-1y-3)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| ACCELEROMETERS | Each axis | ||||
| Dynamic Range | ±50 | g | |||
| Repeatability | −45°C ≤ TC ≤ +85°C | ±0.02 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C | ||
| Misalignment | Axis to axis | ±0.05 | Degrees | ||
| Axis to frame (package) | ±0.05 | Degrees | |||
| Nonlinearity | Best fit straight line, ±50 g | 0.2 | % of FS | ||
| Bias Repeatability | −45°C ≤ TC ≤ +85°C, 1 σ | 1 | mg | ||
| In-Run Bias Stability | 1 σ | 0.1 | mg | ||
| Velocity Random Walk | 1 σ | 0.005 | m/sec/√hr | ||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C | ±0.025 | mg/°C | ||
| Output Noise | No filtering | 0.8 | mg rms | ||
| 3 dB Bandwidth | 100 | Hz | |||
| Sensor Resonant Frequency | 2 | kHz |
80g Accelerometers(KT-EX6-1y-4)
Table 9 Specifications, accelerometers (80g,KT-EX6-1y-4)
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| ACCELEROMETERS | Each axis | ||||
| Dynamic Range | ±80 | g | |||
| Repeatability | −45°C ≤ TC ≤ +85°C | ±0.02 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C |
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit | |
| Misalignment | Axis to axis | ±0.05 | Degrees | |||
| Axis to frame (package) | ±0.05 | Degrees | ||||
| Nonlinearity | Best fit straight line, ±80 g | 0.3 | % of FS | |||
| Bias Repeatability | −45°C ≤ TC ≤ +85°C, 1 σ | 2 | mg | |||
| In-Run Bias Stability | 1 σ | 0.2 | mg | |||
| Velocity Random Walk | 1 σ | 0.01 | m/sec/√hr | |||
| Bias Temperature Coefficient | −45°C ≤ TC ≤ +85°C | ±0.025 | mg/°C | |||
| Output Noise | No filtering | 0.8 | mg rms | |||
| 3 dB Bandwidth | 100 | Hz | ||||
| Sensor Resonant Frequency | 2 | kHz | ||||
Inclinometers
Table 10 Specifications, inclinometers
| Parameter | Test Conditions/Comments | Min | Typ | Max | Unit |
| Inclinometers | Each axis | ||||
| Dynamic Range | ±1.7 | g | |||
| Repeatability | −45°C ≤ TC ≤ +85°C | ±0.02 | % | ||
| Sensitivity Temperature Coefficient | −45°C ≤ TC ≤ +85°C, 1 σ | ±10 | ppm/°C | ||
| Misalignment | Axis to axis | ±0.05 | Degrees | ||
| Axis to frame (package) | ±0.05 | Degrees | |||
| Nonlinearity | Best fit straight line, ±1 g | 0.05 | % of FS | ||
| Bias Repeatability | −45°C ≤ TC ≤ +85°C, 1 σ | 1 | mg | ||
| In-Run Bias Stability | 1 σ | 0.05 | mg | ||
| Velocity Random Walk | 1 σ | 0.08 | m/sec/√hr | ||
| 3 dB Bandwidth | 17 | Hz |